
Vom defekten Rollstuhl zum autonomen Lagerroboter
Viele Robotik-Projekte beginnen mit CAD-Modellen, Simulationen und digitalen Zwillingen.
Bei mir war es genau umgekehrt.
Ich bin gelernter Automechaniker. Wenn ich eine Idee habe, beginne ich nicht mit einer Simulation, sondern mit einer Maschine.
So entstand der Alf Warehouse Robot.
Besucht mich an meinem Stand an der makerfaire.ch

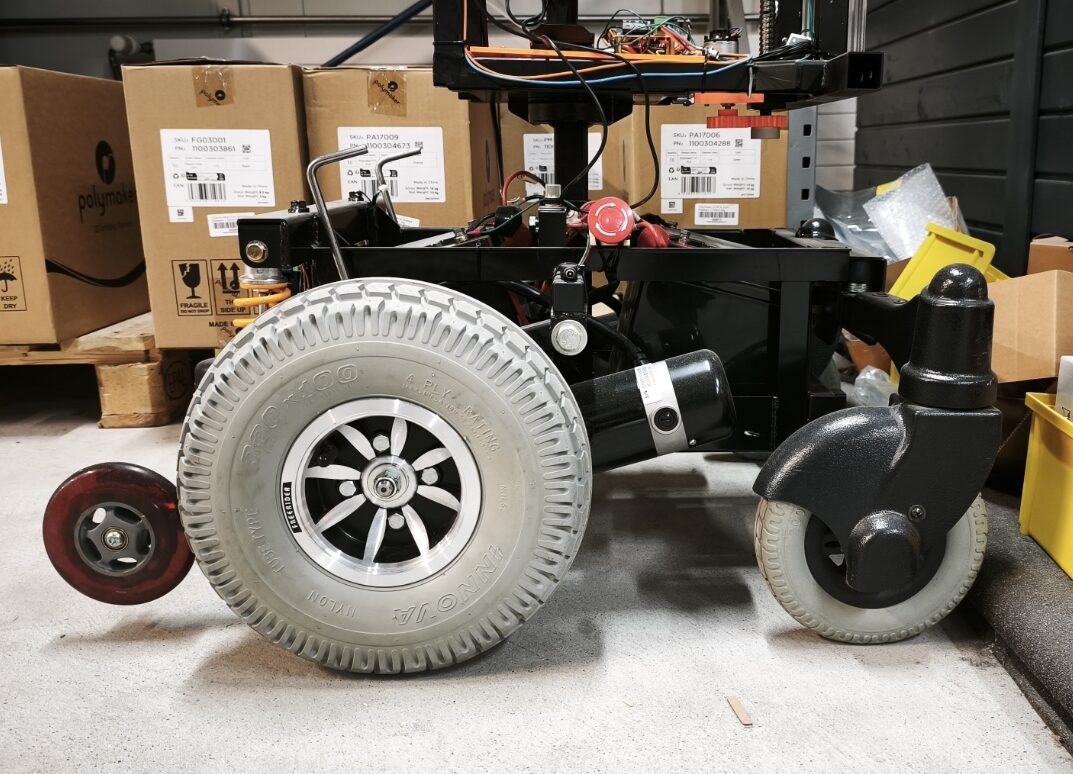
Bildbeschreibung: Aktueller Entwicklungsstand des Alf Warehouse Robot mit Hubmast, Motorsteuerung, Lidar und Roboterarmen.
Der Anfang
Die Basis des Projekts war ein defekter Elektrorollstuhl, den ich günstig über Ricardo gekauft habe.
Die Plattform brachte bereits vieles mit, was für einen Lagerroboter benötigt wird:
- leistungsstarke Antriebsmotoren
- robuste Mechanik
- hohe Traglast
- elektromagnetische Sicherheitsbremsen
- industrielle Qualität
Nach der Reparatur war schnell klar, dass daraus mehr entstehen könnte als nur ein fahrbarer Untersatz.
Die Idee eines autonomen Lagerroboters war geboren.
Die ersten Gehversuche
Mein ursprünglicher Plan war, die vorhandene PG Drives VR2 Rollstuhlsteuerung weiterzuverwenden.
Dafür analysierte ich das Kommunikationsprotokoll des Joysticks mit einem Logic Analyzer und konnte die Kommunikation erfolgreich entschlüsseln.
Die Ansteuerung funktionierte bereits.
Trotzdem zeigte sich bald ein Problem:
Die proprietäre Elektronik schränkte die Entwicklung unnötig ein.
Jede neue Funktion musste sich an die Logik der Rollstuhlsteuerung anpassen.
Für einen Roboter, der später autonom arbeiten soll, war das keine ideale Grundlage.
Komplettumbau der Steuerung
Deshalb entschied ich mich für einen radikalen Schritt.
Die komplette Originalsteuerung wurde entfernt.
Heute übernimmt ein Cytron SmartDriveDuo-60 (MDDS60) die direkte Ansteuerung der beiden Antriebsmotoren.
Zusätzlich wurden zwei Solid-State-Relais eingebaut, um die elektromagnetischen Bremsen der Rollstuhlmotoren anzusteuern.
Dadurch entstand eine vollständig offene Plattform, die direkt über ROS2 gesteuert werden kann.

Bildbeschreibung: Der Cytron MDDS60 Motorcontroller mit den beiden Solid-State-Relais für die elektromagnetischen Bremsen.
Hubmast und Roboterarme
Damit der Roboter nicht nur fahren, sondern auch arbeiten kann, entstand ein eigener Hubmast.
Auf diesem Hubsystem werden zwei SO-101 Roboterarme montiert.
Durch die Kombination aus Fahrwerk, Hubmast und zwei Armen kann der Roboter später Produkte aus unterschiedlichen Regalhöhen entnehmen.
Das Ziel ist nicht einfach ein fahrender Roboter, sondern ein echter Lagerassistent.
Sehen lernen
Für die Objekterkennung kommen zwei Intel RealSense D405 Tiefenkameras zum Einsatz.
Die Kameras liefern nicht nur Farbbilder, sondern auch präzise Tiefeninformationen.
Dadurch kann der Roboter später:
- Produkte erkennen
- Entfernungen messen
- Greifpunkte berechnen
- Regalfächer analysieren
Bei der Integration zeigte sich jedoch schnell, dass die Praxis komplizierter ist als die Theorie.
Gerade bei den Koordinatensystemen und der Verarbeitung der Tiefendaten entstehen zahlreiche Herausforderungen.
Der digitale Zwilling
Der Roboter existierte bereits lange als reale Maschine.
Erst als moderne KI-Werkzeuge leistungsfähig genug wurden, entstand die Idee, einen vollständigen digitalen Zwilling aufzubauen.
Mit Unterstützung von Codex wurde ein umfangreiches XACRO-Modell erstellt, das heute den gesamten Roboter beschreibt.
Dazu gehören:
- Fahrwerk
- Hubmast
- beide Roboterarme
- Kameras
- Sensoren
- sämtliche Gelenke
Heute lässt sich der komplette Roboter direkt im Browser darstellen und bewegen.
Jede Änderung kann zunächst virtuell getestet werden, bevor sie auf die reale Maschine übertragen wird.
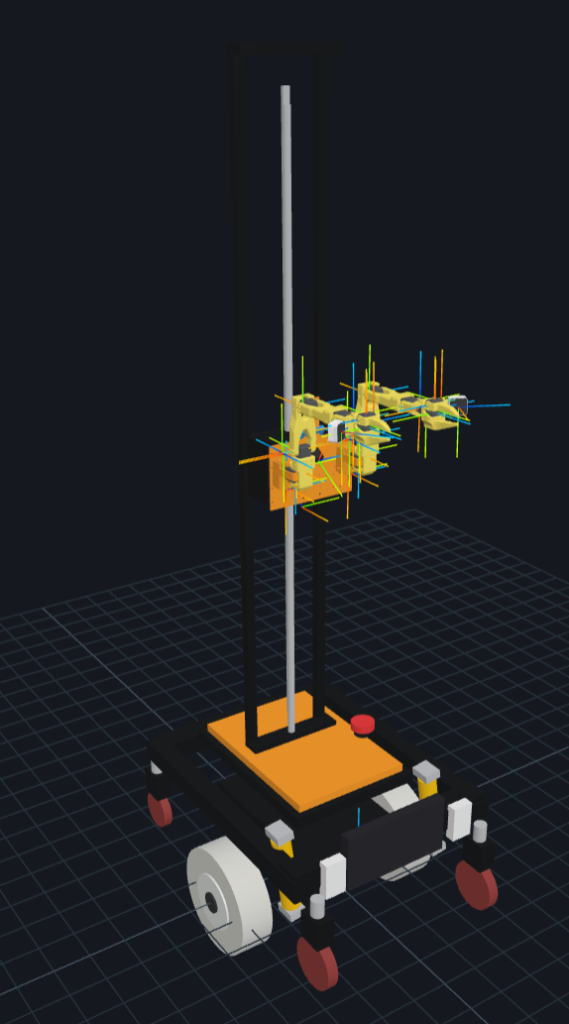
Bildbeschreibung: Der digitale Zwilling des Alf Warehouse Robot. Sämtliche Achsen, Sensoren und Roboterarme können simuliert und getestet werden.
Hier kannst du an meinem Modell rumspielen: https://www.bastelgarage.ch/robot/
KI als Werkzeug
Die KI hat den Roboter nicht gebaut.
Der Roboter stand bereits in der Werkstatt.
Aber die KI hat geholfen, die komplexen Robotermodelle für ROS2 zu erstellen und weiterzuentwickeln.
Dadurch konnte in kurzer Zeit ein digitaler Zwilling entstehen, dessen Erstellung früher Wochen oder Monate gedauert hätte.
Für mich ist KI kein Ersatz für praktische Erfahrung, sondern ein zusätzliches Werkzeug – ähnlich wie ein Akkuschrauber oder eine CNC-Fräse.
Technischer Deep Dive als Podcast (KI generiert, was sonst 🙂
Während der Entwicklung sind viele technische Probleme aufgetreten, die im Blogartikel nur kurz angeschnitten werden können.
Deshalb habe ich aus den Projektunterlagen einen rund 30-minütigen Podcast erstellen lassen.
Darin geht es unter anderem um:
- Aufbau des ROS2-TF-Trees
- Intel RealSense D405 Kameras
- Koordinatensysteme
- Tiefenachsen und Transformationen
- XACRO-Modellierung
- Sensorintegration
- Aufbau des digitalen Zwillings
🎧 Podcast anhören (ca. 27 Minuten) schaut dazu das bild oberhalb an.
Wie geht es weiter?
Der Roboter fährt bereits.
Die Motorsteuerung funktioniert.
Der Hubmast arbeitet.
Der digitale Zwilling existiert.
Als Nächstes folgen:
- Integration der beiden SO-101 Arme
- vollständige Kameraanbindung
- autonome Navigation
- Objekterkennung
- Anbindung an die Lagerverwaltung
- erste automatische Pickversuche
Noch ist der Alf Warehouse Robot nicht fertig.
Aber aus einem defekten Rollstuhl ist bereits eine leistungsfähige Robotik-Plattform entstanden.
Und das ist erst der Anfang.
Fortsetzung folgt …